
Hænger du fast i vekselstrømsteori eller beregning af vekselstrømskredse? Dette indlæg vil hjælpe dig på den rette vej. Jeg kommer ind på teorien bag vekselstrøm, samt beregning af et vekselstrømskredsløb. Indlægget vil indeholde eksempler, formler og forslag til fremgangsmåder, der skal hjælpe dig med at forstå og beregn på vekselstrøm.
Grundet en vekslende spænding i vekselstrøm, vil der opstå spole- og kondensatoreffekter. Dette betyder, at teorien og beregning er mere avanceret end jævnstrømsteorien. Derfor bør du have styr på jævnstrømsteorien, før du begynder her. Har du problemer med jævnstrøm, så læs mit indlæg omkring dette først. Du finder indlægget her.
Har du ris, ros, ideer til forbedring eller blot spørgsmål? Så anvend kontaktformularen i bunden af dette indlæg eller under kontakt i topmenuen.
Vekselstrømsteori (AC) – Hvad er vekselstrøm?

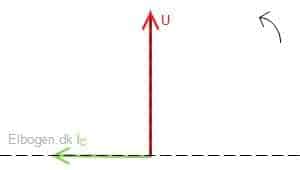
Den store forskel på jævnstrøm og vekselstrøm er, hvordan spændingen agerer. Ved jævnstrøm er spændingen fast – hvilket medfører en strøm i en retning. Vekselstrøm har en varierende spænding, der varierer mellem et positiv og negativ værdi. Når spændingen ændre fortegn, vil strømmen ligeledes skifte retning. Figur 1 illustrerer en sinuskurve for en almindelig 1-faset net med en frekvens på 50 Hertz. Frekvensen angiver, hvor mange perioder der er pr. sekund – hvilket betyder at 50 Hertz svarer til 50 perioder pr. sekund. En periodes varighed kan beregnes ved at dele 1 sekund med frekvensen:
![\[t= \frac{1}{f}=\frac{1}{50}=0,02 [s]=20 [ms]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-012dc366189436eb5317b54724e63cf6_l3.png "Rendered by QuickLaTeX.com")
Vender vi tilbage til figur 1, er kurven afgrænset til 2 perioder. Første periode er fra 0,00 til 0,02 sekunder (den grønne del af kurven) , hvor spændingen starter på 0 volt, og stiger til en maksimum spænding på 325 volt, hvorefter den igen falder, og efter 0,01 sekunder er spændingen igen 0 volt. Det er første halvbølge af en periode. Efterfølgende begynder anden halvbølge, hvor spændingen nu bliver negativ og falder til minus 325 volt, før den igen stiger mod 0 volt. Her er første periode overstående. Den næste periode går fra 0,02 til 0,04 sekunder (den lilla del af kurven) og inderholder ligeledes en positiv og en negativ halvbølge.
Amplituden af kurven (rød linke) kaldes maksimum spændingen. Når vi beregner på vekselstrømskredse anvender vi effektivværdier, hvilket svarer til den blå linje på figur 1. I Danmark har vi en effektiv spænding på 230V mellem fase og nul. Effektivværdi anvendes til beregninger, da det svarer til samme mængde optaget effekt i jævnstrøm. Hvis en anden effektivværdi var anvendt, ville beregning af effekt være forskelligt i jævnstrøm og vekselstrømskredse. Beregning af effektivværdi kan gøres ud fra maksimumværdien. Effektivværdien er altid kvadratrod 2 mindre end maksimum værdien.
![\[U_{eff}=\frac{U_{max}}{\sqrt{2}}=\frac{325}{\sqrt{2}}=230 [V]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-10793c92867f0ab414a5159cec41de37_l3.png "Rendered by QuickLaTeX.com")
Pågrund af den vekslende spænding, gør kondensator- og spoleegenskaberne, at der kan opstå forskydning mellem strøm og spænding. Derved opstår forskellige typer modstande, spændinger, strømme og effekter. De forskellige udtryk forklares her under.
Impedans og modstande i vekselstrøm

Impedans (Z) er et udtryk for den samlede modstand i en vekselstrømskreds, og dækker over flere typer modstande, der er forskudt i forhold til hinanden – grundet faseforskydningen. Faseforskydningsvinkel opstår, når der tilsluttes komponenter med spole- eller kondensatoreffekter. Det gør, at modstandene ikke kan lægges sammen normalvis. Herunder kan du se modstandstyperne, der eksistere ved vekselstrøm. Symbolerne for modstandene ses på figur 2.
- Resistansen (R): Ohmske modstande
- Induktive reaktans (XL): Modstande der opstår ved spoler
- Kapacitive reaktans (XC): Modstande der opstår ved kondensatorer
Resistansen

Resistansen er den type modstand du kender fra jævnstrøm, og kan måles med et multimeter. Resistansen er en ren ohmsk modstand – eksempelvis et varmelegeme. Betegnelse ren ohmsk modstand betyder, at strøm og spænding er i fase – og dermed er der ingen faseforskydning. Figur 3 illustrerer at spænding og strømmen ligger i fase med hinanden. Figuren skal forstås på den måde, at vektorerne rotere mod uret. En omgang svarer til en periode i en sinuskurve. Har du en ren ohmsk modstand, vil du kunne anvende beregningerne fra jævnstrøm.
[su_note] Ved en resistiv belastning ligger strøm og spænding i fase[/su_note]

Induktive reaktans
En induktive reaktans opstår grundet spoleeffekterne. Det er en værdi, du ikke kan måle med et almindeligt multimeter, da den kun opstår på grund af varierende spænding. Derved har vekselstrømmens frekvens indflydelse på den induktive reaktans størrelse. Den induktive reaktans kan beregnes ud fra spolens induktans (L) og frekvens (f). Formlen er følgende:
![\[X_L=2\pi*f*L [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-7ecdf084310f7d21b41f44567fc735d2_l3.png "Rendered by QuickLaTeX.com")
Den induktive reaktans enhed er ligeledes Ohm, hvor frekvensen er i Hertz (Hz) og induktansen i Henry [H]. En huskeregel, hvorpå jeg husker formlen er ved at sige 2 piger fra landet (2*π*f*L).
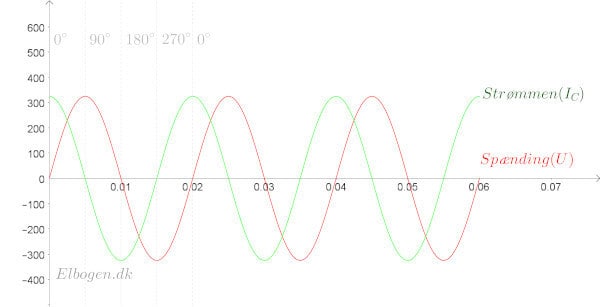
En induktiv belastning vil forskyde strømmen 90 grader bagud i forhold til spænding Eller spænding er 90 grader foran strømmen). Dette er skitseret på figur 4, hvor vektorerne roterer mod uret. Derved er spændingen foran strømmen. Spændingen vi nå dens maksimumværdi før strømmen, der først når sin maksimumværdi 90 grader senere. Ved en frekvens på 50 Hertz vil strømmen altså først nå maksimum værdi 1/4 del af en periode senere – altså 0,005 sekunder senere. Overføres det til sinuskurven, ser det ud som figur 5.

[su_note] Ved en induktiv belastning er strømmen 90 grader bagud i forhold til spændingen[/su_note]
Vektoriel beregning:
Når man beregner elektriske kredsløb på en højere uddannelse end elektrikeruddannelsen – eksempelvis maskinmester- eller installatørudannelsen, anvender man oftest vektorielle beregninger. Vektorielt anvendes til at beregninger med vinkler, hvilket bliver relevant ved vekselstrøm, da strøm og spændinger er forskudt. Derfor når man beregner en induktiv belastning, vil den induktive reaktans beregnes med en vinkel på 90 grader. Dette skyldtes, at strømmen er 90 grader bagud i forhold til spændingen. Derfor kan det sættes op på følgende måde med Ohms Lov:
![\[\angle X_L=\frac{\angle U}{\angle I}=\frac{0^\circ}{-90^\circ}=90^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-6251a1d6fca0eec6ede28eb28a88a512_l3.png "Rendered by QuickLaTeX.com")
Derfor vil resultatet af den induktive reaktans ende ud med en 90 graders vinkel.
Kapacitive reaktans
Den sidste part er den kapacitive reaktans, der opstår grundet kondensatoreffekter. Den kapacitive reaktans kan hellere ikke måles med et almindelig multimeter, da den ligeledes opstår grundet varierende spænding. Derved har igen frekvensen og kondensatorens kapacitans (C) indflydelse på den kapacitive reaktans. Den kan beregnes med følgende formel:
![\[X_C=\frac{1}{2\pi*f*C}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-8bcf56c0001bf03c74cf5d03a1a05198_l3.png "Rendered by QuickLaTeX.com")
Den kapacitive reaktans beregnes i ohm, hvor frekvensen er i hertz og kapacitansen i Fahrad (F). Ofte opgives kapacitansen i mikrofahrad, hvilket er svarende til 6 gange nul (1 mikro = 0,000001). Formlen kan derved ombygges, så du kan sætte kapacitansen ind i mikro.
![\[X_C=\frac{10^6}{2\pi*f*C[\mu]}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-43432752036549bda0877f96ed998962_l3.png "Rendered by QuickLaTeX.com")
En kapacitiv belastning er spændingen 90 grader bagud i forhold til strømmen (Eller strømmen er 90 grader forud). Dette er skitseret på figur 6, hvor vektorerne drejer mod uret. I praktisk betyder det, at strømmen når sin maksimumværdi 90 grader før spændingen. Det svarer til 1/4 del af en periode eller 0,005 sekunder. Dette kan ligeledes overføres til en sinuskurve, der er vist på figur 7.
[su_note] Ved en kapacitiv belastning er strømmen 90 grader foran spændingen[/su_note]
Vektorielt beregning
Igen kan den kapacitive del beregnes med vektorielle beregninger. Her beregnes den kapacitive reaktans med -90 graders vinkel. Det skyldtes, at strømmen er foran spænding med 90 grader. Derfor kan det bevises på følgende måde:
![\[\angle X_C=\frac{\angle U}{\angle I}=\frac{0^\circ}{90^\circ}=-90^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-7561aabaa9ca3b0566921c86af220f34_l3.png "Rendered by QuickLaTeX.com")
Beregning af impedansen

Impedansen er som sagt resultatet af alle resistive og reaktive vektorere. Beregner vi vektorernes vinkler ud fra ohms lov, kommer vi frem til vektorerne placering:

Den induktive og kapacitive reaktans er derved forskudt henholdsvis 90 grader forud og 90 grader bagud. Derfor har de en forskydning på i alt 180 grader. Dette medfører, at den induktive og kapacitive reaktans modvirker hinanden, da vektorerne peger i hver retning. Placering af de 3 vektorer illustreres på Figur 8.
Flyttes vektorerne i forlængelse af hinanden, vil det danne en trekant, hvor du har to kateter. Hypotenusen er af de to vektorer er resultatet og dermed vores impedans. Figur 9 illustrerer trekanten, der også kaldes modstands- eller impedanstrekanten. Da trekanten er en retvinkel trekant, åbnes muligheden for beregning af impedansen ved hjælp af pythagoras.
![\[Z^2=R^2+X^2 \Leftrightarrow Z=\sqrt{R^2+X^2}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-ef9dac2bfaab55f5bd4cf972618544d9_l3.png "Rendered by QuickLaTeX.com")
Ved ovenstående formel er X resultatet af de to reaktansen. Da der som sagt er 180 grader mellem de to vektor modarbejder de hinanden. Derved er reaktansen (X) lig med:
![\[X=X_L-X_C \ \ eller \ \ X=X_C-X_L\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-7f7f98fdd876ae4584245af011707aa7_l3.png "Rendered by QuickLaTeX.com")
Ved beregning af reaktans trækkes den mindste værdi altid fra den største værdi, da en negativ reaktans er umuligt. Er den induktive reaktans XL størst, vil du have en induktiv belastning. Er den kapacitive reaktans Xc størst, vil du have en kapacitiv belastning. Er den induktive og kapacitive del ens, vil du have en ren resistiv belastning, da de udligner hinanden.
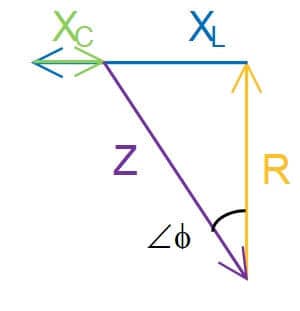
Når du har en induktiv eller kapacitiv belastning, har du en faseforskydning. Det betyder, at strøm og spænding ikke følges af som beskrevet tidligere. Faseforskydning er vinklen mellem resistansen (R) og impedansen (Z) i trekanten. Den beregnes ved hjælp af almindelige cosinus:
![\[\angle \phi=cos^{-1}(\frac{R}{Z})\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-80571400d2667efab5b7ac760544762c_l3.png "Rendered by QuickLaTeX.com")
Fortegn på vinkel vil afhænge af, hvad der er størst af den kapacitive reaktans (XC) og den induktive reaktans (XL). Er den kapacitive reaktans (XC) største, vil du have en negativ vinkel. Er den induktive reaktans (XL) størst vil du have en positiv vinkel.
Beregning af impedansen kan ligeledes beregnes vektorielt. Dette kræver en mere avanceret lommeregner, men kræver kun en enkelt beregning for beregning af impedansen og faseforskydningsvinklen.
Ved vektorielt beregning, skal du være opmærksom på, at alle vinkler er korrekt angivet med fortegn. Det vil sige, at resistanser har en 0 graders vinkel, induktiv reaktanser har +90 grader og kapacitiv reaktanser har -90 grader.
Har du styr på vektorielle beregninger er det enkelt at beregne impedansen. Dette gøres på følgende måde:
![\[\vec Z=\vec R+\vec X_L+\vec X_C=(R \angle 0^\circ)+(X_L \angle 90^\circ)+(X_C \angle -90^\circ)\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-0df146236d0845911702581d10a71672_l3.png "Rendered by QuickLaTeX.com")
Beregningseksempler
Eksempel 1: En induktiv belastning med en induktans på 3 Henry er tilsluttet et net med 50 Hertz. Beregn den induktive reaktans:
![\[X_L=2\pi*f*L=2*\pi*50*3=942,48 \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-9993fe939cdeb09d2d0c122107b9b083_l3.png "Rendered by QuickLaTeX.com")
Eksempel 2: En kapacitive belastning med en kapacitans på 10 mikro Farad er tilsluttet et ned med 50 Hertz. Beregn den kapacitive reaktans:
![\[X_C=\frac{1}{2\pi*f*C}=\frac{1}{2*\pi*50*10*10^{-6}}=318,31 \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-1809dcd3066968e0e36c31f4ba2cd5c8_l3.png "Rendered by QuickLaTeX.com")
10 opløftet i -6 er omskrivning af mikro til SI-enheden.
Eksempel 3: Beregn impedansen og faseforskydningsvinkel af en kapacitiv reaktans på 100 ohm, en induktiv reaktans på 200 ohm og en resistans på 300 ohm.
![\[Z=\sqrt{R^2+(X_L-X_C)^2}=\sqrt{300^2+(200-100)^2}=316,23 \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-768ca12be1854319a51abf56885286a9_l3.png "Rendered by QuickLaTeX.com")
![\[\angle \phi=cos\phi^{-1}(\frac{R}{Z})=cos\phi^{-1}(\frac{300}{316,23})=18,43^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-34602a3a3ba171ae9414916560917221_l3.png "Rendered by QuickLaTeX.com")
Vektorielt beregning
![\[\vec Z=\vec R+\vec X_L+\vec X_C=(300\angle 0^\circ)+(200 \angle 90^\circ)+(100 \angle -90^\circ)=316,23 \[\Omega]\angle 18,44^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-982ebed454ae336a90aae39b0d06bbc0_l3.png "Rendered by QuickLaTeX.com")
Strømme ved vekselstrøm

Har du en parallelforbindelse, anvender du spændingen som referenceværdien, grundet den er fast. Derved vil spændingen ligge i 0 grader. Derfor kan strømmen være forskudt 90 grader forud eller bagud i forhold til referencepunktet, alt efter om det er en kapacitiv eller induktiv belastning. Som jeg beskrev før i indlægget, var strømmen ved en resistiv belastning i fase med spændingen, og ligger dermed i 0 grader. Strømmen ved en kapacitiv belastning er 90 grader foran spændingen, imens strømmen ved induktiv er 90 grader bagud i forhold til spændingen. Figur 10 viser samme figur som impedanstrekanten, nu med strømbetegnelserne. Bemærk, at trekanten er spejlvendt. Dette skyldtes, at strømme har modsat vinkelfortegn i forhold til reaktanserne. Dette kan forklares i Ohms lov, da du deler med U med I for at få Z. Når man deler med en vektorielt nummer, ændres vinkelfortegnet af vinklen.
Der findes to typer af strømme. Wattstrømme Iw (Kaldes også virkestrømme Iv) og wattløsestrømme Iwl (Kaldes også reaktive strømme Ir).
Wattstrømmen er den strøm, der dannes af resistive belastningen, imens wattløsstrømme er fra reaktanserne. Den wattløsestrøm deles derfor op i spolestrøm (IL) og kondensatorstrøm (IC). De modvirker hinanden på samme måde som den induktive- og kapacitive reaktans gør.
Vi kan derved ved hjælp af ohms lov beregne de forskellige strømme
![\[I_w=\frac{U}{R}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-7529abc65c0f5914d7f0ea30f7ca6c22_l3.png "Rendered by QuickLaTeX.com")
![\[I_wl=\frac{U}{X}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-5172e544d6989a7df2b28b354e9011ff_l3.png "Rendered by QuickLaTeX.com")
Igen er X resultatet af reaktanterne XL og XC.
Den watløse strøm (Iwl) er dermed følgende:
![\[I_{wl}=I_L-I_C \ \ eller \ \I_{wl}=I_C-I_L\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-25e7b8c0d4dc2cb236a114372aa27550_l3.png "Rendered by QuickLaTeX.com")
Da det stadigvæk er en vinkelret trekant, kan vi anvende samme metode som ved beregning af impedansen til beregning af den samlede strømstyrke.
![\[I^2=I_w^2+I_{wl}^2 \Leftrightarrow I=\sqrt{I_w^2+I_{wl}^2}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-e34bab65f73381f958af75dbfcf7ddfa_l3.png "Rendered by QuickLaTeX.com")
Hvis man beregner vinkel, som ved impedansen, vil man få en modsat fortegn på vinklen. Hvilket skyldtes ohms lov.
Strømme kan ligeledes beregnes vektorielt, hvor du også får vinklen på strømmen med. Den kan du anvende til beregning af flere forskellige strømme. Du behøver derfor ikke at dele strømme op i wattstrømme og wattløsestrømme som ved trekantsberegning.
![\[\vec I=\vec I_w+\vec I_C+\vec I_L\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-379e7d812ecd373fc6f82257dd4e0a73_l3.png "Rendered by QuickLaTeX.com")
Beregningseksempler
Eksempel 1: Et parallelkredsløb med en induktiv strøm på 2 ampere er koblet med to kapacitive strømme på 0,5 og 0,8 ampere. Hvad er den samlede strøm i kredsløbet?
![\[I=\sqrt{I_w^2+I_{wl}^2}=\sqrt{I_{wl}^2}=I_{wl}=2-0,5-0,8=0,7 \[A]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-9fe40cc70c17a8a06dc809f620e816af_l3.png "Rendered by QuickLaTeX.com")
Da vi ikke har en resistans med en virkestrøm, vil den part udgå. Derved har vi kvadratroden af noget i anden. De ophæver hianden, og derved har vi kun den wattløse strøm tilbage. Samtidig vil vinklen være -90 grader, da det er en ren induktiv belastning.
Vektorielt beregninger
![\[\vec I=\vec I_L+\vec I_{C1}+\vec I_{C2}=(2\angle -90^\circ)+(0,5 \angle 90^\circ)+(0,8 \angle 90^\circ)=0,7 \[A] \angle -90^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-34ed16b43f04b5fb7742d62e919b0ee2_l3.png "Rendered by QuickLaTeX.com")
Spændinger ved vekselstrøm

Beregner du på serieforbindelser, har vi som sagt den samme strøm igennem hele kredsløbet. Samtidig har vi spændingsfald over de forskellige komponenter. Det betyder, at spændingerne ligeledes kan forskydes i forhold til til strømmen grundet reaktansens påvirkning.
Figur 11 viser spændingernes placering. Derved kan spændingerne beregnes efter samme princip som impedans og strømme.

Husk at trække den mindste af spole- og kondensatorspændingsfaldet fra den største, da de modvirker hinanden. Ud fra spændingstrekanten kan du også beregne faseforskydningsvinklen, da spændingerne har samme vinkler som modstande og reaktanserne. Derved kan følgende anvendes:
![\[\angle \phi=cos^{-1}(\frac{U_R}{U})\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-6d6f130edb4d101f1739ff77097a98a3_l3.png "Rendered by QuickLaTeX.com")
Vektorerne kan ligeledes lægges sammen vektorielt:
![\[\vec U=\vec U_R+\vec U_L+ \vec U_C\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-126c4c8e4e6234f455ed9e654ea8afcd_l3.png "Rendered by QuickLaTeX.com")
Beregningseksempler
Eksempel 1: Du har en induktiv spændingsfald på 30V, en kapacitiv spændingsfald på 5 V og en resistiv spændingsfald på 80 V i serie. Beregn den samlede spændingsfald i kredsløbet:
Trekantsmetoden:
![\[U=\sqrt{U_R^2+(U_L-U_C)^2}=\sqrt{80^2+(30-5)^2}=83,82 \ [V]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-3944b531c61fd48429cd5f7be9510390_l3.png "Rendered by QuickLaTeX.com")
Da den induktive spændingsfald er størst vil den være først.
Vektorielt beregninger
![\[\vec U=\vec U_R+\vec U_L+\vec U_C=(80\angle 0^\circ)+(30 \angle 90^\circ)+(5 \angle -90^\circ)=83,82 \ [V] \angle 17,35^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-8cd320396275f5d1d87c378a35d06507_l3.png "Rendered by QuickLaTeX.com")
Eksempel 2: Et kredsløb koblet i serie med 2 induktive spændingsfald på henholdsvis 30 og 45 V, en kapacitiv spændingsfald på 20 V og to resistive spændingsfald på 50 og 60 V. Beregn den samlede spændingsfald:
Trekantsmetoden:
![\begin{align*} &U_L=U_{L1}+U_{L2}=30+45=75 \[V] \\ &U_C=U_{C1}=20 \ [V] \\ &U_R=U_{R1}+U_{R2}=50+60=110 \ [V] \\ &U=\sqrt{U_R^2+(U_L-U_C)^2}=\sqrt{110^2+(75-20)^2}=122,98 \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-fd9c1d482470035559bf12c8c83c7ad0_l3.png "Rendered by QuickLaTeX.com")
Da den induktive spændingsfald er størst vil den være først.
Vektorielt beregninger
![\begin{align*} &\vec U=\vec U_{R1}+\vec U_{R2}+\vec U_{L1}+\vec U_{L2}+\vec U_C \\ &\Updownarrow \\ &\vec U=(50\angle 0^\circ)+(60\angle 0^\circ)+(30 \angle 90^\circ)+(45 \angle 90^\circ)+(20 \angle -90^\circ)=122,98 \ [V] \angle 26,57^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-78c5401dfb717ba6972469c78b4aacff_l3.png "Rendered by QuickLaTeX.com")
Eksempel 3: Et serie kredsløb med en kapacitiv spændingsfald på 45 V, en induktiv spændingsfald på 30V og en resistiv spændingsfald på 50 V. Beregn den samlede spændingsfald:
Trekantsmetoden:
![\[U=\sqrt{U_R^2+(U_C-U_L)^2}=\sqrt{50^2+(45-30)^2}=52,20 \ [V]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-d7cfd936955c43e8e1cd2dee6b828cc7_l3.png "Rendered by QuickLaTeX.com")
Da den kapacitive spændingsfald er størst vil den være først.
Vektorielt beregninger
![\begin{align*} &\vec U=\vec U_R+\vec U_L+\vec U_C \\ &\Updownarrow \\ &\vec U=(50\angle 0^\circ)+(30 \angle 90^\circ)+(45 \angle -90^\circ)=52,20 \ [V] \angle -16,70^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-0749caf79ff905eb551cbf62c93c6c26_l3.png "Rendered by QuickLaTeX.com")
Effekter i vekselstrøm
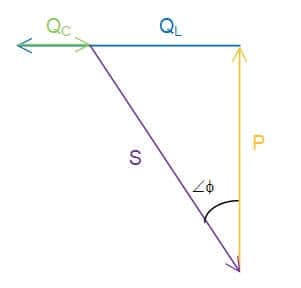
Den sidste parameter ved vekselstrøm er effekter. Vi kender effekten watt fra jævnstrøm. Når vi snakker vekselstrøm har vi flere effekter, nemlig den tilsydeladende effekt (S), reaktiveffekten (Q) og virkeeffekten (P). Den du som forbruger betaler for er virkeeffekten, imens reaktiveffekten er den effekt der dannes af spoler og kondensatorer. Dem vil forsyningsselskabet gerne begrænse, da de ikke får værdi for dem. Derudover har vi den samlede effekt kaldet den tilsyneladende effekt. Den tilsyneladende effekt er resultatet af alle vektorerne, og er den belastning man dimensionerer elsystemer efter.
Hvad måles disse effekter i?
- Virkeeffekt måles i watt (W)
- Reaktiveffekt måles i Volt Ampere reaktiv (var)
- Tilsyneladende effekt måles i Volt ampere (VA)
Figur 12 viser endnu en trekant med effekternes placering, hvilket til sammenligning ligner spændings- og modstandstrekanterne.
De forskellige effekter kan beregnes ud fra effektloven. Det vil sige følgende:
![\begin{align*} &P=U_R*I_w \[W] \\ &Q=U_L*I_{wl} \ [var]\\ &S=U*I \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-204de93b8e5daecdf3fe684e538865bd_l3.png "Rendered by QuickLaTeX.com")
Alle effekter kan dog beregnes ved hjælp af den fulde strøm og den påtrykte spænding, ved anvendelse af cosp. Derved kan det se ud som følgende:
(1) ![\begin{align*} &P=U*I*cos\phi \ [W] \\ &Q=U*I*sin\phi \ [var] \end{align**}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-ba5fc0abef50c323b0535f3a25a3e526_l3.png "Rendered by QuickLaTeX.com")
Derudover kan effekterne også lægges sammen efter pythagoras og vektorielt.

Faseforskydningsvinkel
Grundet forskydningen af strøm og spænding, har du et udtryk kaldet faseforskydning. Faseforskydning er vinklen, som fase og strøm er forskudt i forhold til hinanden. Det kan beregnes på flere måder. Tager vi vores impedanstrekant (figur 13), og ud fra den, bestemmer beregning af faseforskydningsvinklerne. Har vi lidt styr på trekantsberegning, kan vi let ved hjælp af cosinus, sinus og tangens beregne faseforskydningsvinklen.

X den reaktive del, og er resultatet af XL-XC ved en største induktiv belastning eller XC-XL ved størst kapacitiv belastning. Ved en induktiv belastning, vil du have en positiv faseforskydning, hvorimod ved en kapacitiv belastning vil have en negativ faseforskydningsvinkel.
Udfra formlerne, kan vi beregne faseforskydningen ved blot at kende to komponenter. Dog skal vi vide, om belastningen er induktiv eller kapacitiv før vi kender vinklens fortegn.
[su_related_post_in_text][bibblio style=” bib–white-label bib–row-4 bib–title-only bib–portrait bib–square” query_string_params=e30=][/su_related_post_in_text]
Serieforbindelser

Princippet og fremgangsmåden til beregning af vekselstrøms serieforbindelse er ens med jævnstrømskredse. Strømmen er konstant gennem kredsløbet, og komponenter i kredsløbet skaber et spændingsfald over dem.
Forskellen på jævnstrøms serieforbindelser og vekselstrøm serieforbindelser er spole- og kondensatoreffekterne der forskyder strøm og spænding. Det har dermed indflydelse på beregningerne af kredsløbet. I dette indlæg vil jeg forklare to forskellige måder, hvorpå du kan beregne vekselstrøm serieforbindelser. Det er ved anvendelse af vektorberegning, der anvendes ofte på højere uddannelsesniveauer, og almindelig pythagoras der oftest anvendes på erhvervsskolerne.
Figur 14 viser en serieforbindelse indeholdende en resistans, en induktiv reaktans og en kapacitiv reaktans. Dermed repræsenteres de tre forskellige belastningstyper. Grundet forskydningen af de forskellige strømme, skal belastningerne lægges sammen med vinkler.
Da vi ved fra jævnstrømsteorien, at strømmen er ens i hele kredsløbet, anvender vi også strømmen ( ) som vores reference i vores vektordiagram. Strømmen placeres derved i 0 grader (Figur 15).
) som vores reference i vores vektordiagram. Strømmen placeres derved i 0 grader (Figur 15).

![]() Den resistive belastning (
Den resistive belastning ( ) ligger altid i fase med strømmen, og dermed med en vinkel på 0 grader i forhold til strømmen. Dette er illustreret med den orange pil på figur 15 (
) ligger altid i fase med strømmen, og dermed med en vinkel på 0 grader i forhold til strømmen. Dette er illustreret med den orange pil på figur 15 ( ). Ved en induktiv belastning er strømmen altid 90 grader bagud i forhold til spændingen. Derfor vil spændingen have en vinkel på 90 grader, hvilket vises med den mørkeblå pil (
). Ved en induktiv belastning er strømmen altid 90 grader bagud i forhold til spændingen. Derfor vil spændingen have en vinkel på 90 grader, hvilket vises med den mørkeblå pil ( ). Den sidste del er den kapacitive belastning, hvor strømmen er 90 grader foran spændingen, og dermed er spændingen 90 grader forskudt bagud. Dette vises ved den grønne pil (
). Den sidste del er den kapacitive belastning, hvor strømmen er 90 grader foran spændingen, og dermed er spændingen 90 grader forskudt bagud. Dette vises ved den grønne pil ( ).
).
Beregning af impedans, resistans og reaktans i serieforbindelser
Først beregnes den kapacitive og induktive reaktans:
![\[X_L=2\pi*f*L\space \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-e91dfc53dad3ae03658f0b1b88f56200_l3.png "Rendered by QuickLaTeX.com")
![\[X_C=\frac{1}{2\pi*f*C} \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-bc2ea62751d44fa792fed69a46fdd4da_l3.png "Rendered by QuickLaTeX.com")
Har vi alle reaktanser og vores resistanser, kan vi beregne vores impedans. Dette kræver, at vi beregne det ud fra, at reaktanser og resistanser er placeret som figur 16. Derved kan de ikke lægges sammen almindeligvis, men skal istedet lægges sammen med vinkler. Vi kan enten anvende pythagoras eller vektorberegning til dette.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af impedansen ud fra pythagoras.
![\[Z=\sqrt{R^2+(X_L-X_C)^2} \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-d1bb3e1ab77c0c009148dffff6e8ce43_l3.png "Rendered by QuickLaTeX.com")
Har vi en større induktiv belastning, trække vi den kapacitive reaktans fra den induktive. Er den kapacitive størst trækkes den induktive reaktans fra den kapacitive.
De overstående beregnet impedans kan sammen med resistansen anvendes til at beregne faseforskydningsvinkel i kredsløbet.
![\[\angle \phi=cos^{-1}(\frac{R}{Z}) \ [^{\circ}]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-fde48bd1cbdbc9c90a266aae3a9fc061_l3.png "Rendered by QuickLaTeX.com")
Ved en induktiv belastning af vi en positiv vinkel, og ved en kapacitive belastning af vi en negativ vinkel.
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Ved vektorielt beregningerne, kan beregning forkortes til en ligning. Dette optimerer beregningen, hvilket blandt andet kan være nyttig ved elinstallatørprøven, hvor tiden er en stor faktor.
![\begin{align*} &\vec Z=\vec R+\vec X_L+\vec X_C \\ &\vec Z=(R\angle 0^{\circ})+(X_L \angle 90^{\circ})+(X_C \angle -90 ^{\circ}) \ [\Omega] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-b0b05b4b091aedcef83792ddf0600926_l3.png "Rendered by QuickLaTeX.com")
Herefter kommen  ud i ohm, sammen med den faseforskydningsvinkel. Dette giver samme resultat som pythagoras beregninger. Ender du ud med en negativ vinkel, har du en kapacitiv belastning, imens du har en induktiv belastning, hvis vinklen er positiv.
ud i ohm, sammen med den faseforskydningsvinkel. Dette giver samme resultat som pythagoras beregninger. Ender du ud med en negativ vinkel, har du en kapacitiv belastning, imens du har en induktiv belastning, hvis vinklen er positiv.
[/su_tab][/su_tabs]
Beregning af strømmen i serieforbindelser
Har du i en serieforbindelse beregnet strømmen, åbnes ofte muligheden for at beregne de fleste værdier. Det skyldtes at strømmen er referencen, og derved en af de centrale elementer. Beregning af strømmen kan blandt andet foregå ud fra Ohms lov. Du skal blot kende den påtrykte spænding eller en af komponenternes spændingsfald. Derudover kan strømmen ligeledes beregnes med effekterne. Formlerne er vist i boksen herunder.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregninger ud fra spændingen
![\begin{align*} &I=\frac{U}{Z} \ [A] \\ &I=\frac{U_L}{X_L} \ [A]\\ &I=\frac{U_C}{X_C} \ [A] \\ &I=\frac{U_R}{R} \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-b80f83d7d852b00a5a28c26e149238c5_l3.png "Rendered by QuickLaTeX.com")
Beregninger ud fra effekten
![\begin{align*} &I=\frac{S}{U} \ [A] \\ &I=\frac{Q_L}{U_L} \ [A]\\ &I=\frac{Q_C}{U_C} \ [A] \\ &I=\frac{P}{U} \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-1879d15ab6037d3caad14fc4f9f07173_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregninger ud fra spændingen
![\begin{align*} &\vec I=\frac{\vec U}{\vec Z} \ [A] \\ &\vec I=\frac{\vec U_L}{\vec X_L} \ [A]\\ &\vec I=\frac{\vec U_C}{\vec X_C} \ [A] \\ &\vec I=\frac{\vec U_R}{\vec R} \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-337866f0d2451847231023b98a5d02e2_l3.png "Rendered by QuickLaTeX.com")
Beregninger ud fra effekten
![\begin{align*} &\vec I=\frac{\vec S}{\vec U^*} \ [A] \\ &\vec I=\frac{\vec Q_L}{\vec U_L^*} \ [A]\\ &\vec I=\frac{\vec Q_C}{\vec U_C^*} \ [A] \\ &\vec I=\frac{\vec P}{\vec U^*} \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-c7dffc4dd05708ed237b8a57aa5bbd5b_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Strømmens vinkel vil ende ud med 0 grader, hvis vi har valgt at reference punktet er 0 grader. Strømmens reference punkt kan være en hvilken som helst vinkel. Dog er det nemmeste at beregne, hvis denne er 0 grader. Senere når vi skal beregne på blandede forbindelser, vil strømmens reference punkt kunne have en anden vinkel end 0 grader.
Beregning af spænding i serieforbindelser
Ved jævnstrøms serieforbindelser lærte vi, at hver modstand skaber et spændingsfald. Dette er stadigvæk gældende. Ved vekselstrøm skabes der et spændingsfald over resistanser og reaktanser. Spændingsfaldene er dog ikke i vinkel, da der som sagt er sket en forskydning af strøm og spænding. Derved vil spændingerne placeres som på figur 17, hvor den resistive spændingsfald ligger i fase, og de reaktive spændingsfald er 90 grader forskudt henholdsvis forud og bagud. Den kapacitive og induktive spændingsfald modvirker hinanden som tidligere nævnt.
Det er stadigvæk muligt at beregne de enkelte spændingsfald på følgende måde og den samlede spændingsfald ud fra følgende principper.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte spændingsfald
![\begin{align*} &U_R=I*R \ [V] \\ &U_L=I*X_L \ [V] \\ &U_C=I*X_C \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-e01ca50edcc9e0567d00122ce1b30455_l3.png "Rendered by QuickLaTeX.com")
Derudover kan den samlede spændingsfald, hvilket svarer til den påtrykte spændingsfald, beregnes på følgende måder:
Den samlede spændingsfald
![\begin{align*} &U=I*Z \ [V] \\ &U=\sqrt{U_R^2+(U_L-U_C)^2} \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-c36ed990c00bf6d4545188d1bd05318f_l3.png "Rendered by QuickLaTeX.com")
Den største af de reaktive spændingsfald ( eller ) skal stå først.
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte spændingsfald
![\begin{align*} &\vec U_R=\vec I*\vec R=(I \angle 0^\circ)*(R\angle 0^\circ) \ [V] \\ &\vec U_L=\vec I*\vec X_L=(I \angle 0^\circ)*(X_L\angle 90^\circ) \ [V] \\ &\vec U_C=\vec I*\vec X_C=(I \angle 0^\circ)*(X_C\angle -90^\circ) \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-b22c69ae35e179584b632a8e72c0e871_l3.png "Rendered by QuickLaTeX.com")
Derudover kan den samlede spændingsfald, hvilket svarer til den påtrykte spændingsfald, beregnes på følgende måder:
Den samlede spændingsfald
![\begin{align*} &\vec U=\vec I*\vec Z=(I \angle 0^\circ)*(Z\angle \phi^\circ) \ [V] \\ &\vec U=\vec U_R+\vec U_L+\vec U_C \\ &\Updownarrow \\ &\vec U=(U_R \angle 0^\circ)+(U_L \angle 90^\circ)+(U_C \angle -90^\circ) \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-6800eacadfe6a89b9976f6a1eebb546f_l3.png "Rendered by QuickLaTeX.com")
Endes resultat ud med en negativ vinkel, vil belastningen være kapacitiv, hvorimod en positiv vinkel viser, at det er en induktiv belastning vi har.
[/su_tab][/su_tabs]
Vinklen på den samlede spænding er lige med faseforskydningsvinklen, og derved er vinklen lig med impedansen ( ) vinkel.
) vinkel.
Effekter ved serieforbindelse
De sidste dele, vi kan beregne er effekterne. Som jeg beskrev i indlægget omkring vekselstrømsteori, findes der 3 forskellige effekter. De relaterer til effekten i resistanser (virkeeffekten), effekter i reaktanser (reaktive effekt) og den samlede effekt (tilsyneladende effekt).
De forskellige effekter kan beregnes individuelt. Virkeeffekten, den vi betaler for, beregnes ud fra den resistive belastning. Den reaktive effekt opstår ved spole og kondensator, hvilket vil sige induktive og kapacitive belastninger.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte effekter kan beregnes ud fra effektloven.
![\begin{align*} &P=U*I*cos\phi=U_R*I \ [W] \\ &Q_L=U_L*I \ [var] \\ &Q_C=U_C*I \ [var] \\ &Q=Q_L-Q_C=U*I*sin\phi=(U_L-U_C)*I \ [var] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-c304c498e5a9a96f3c746b420d3c38d2_l3.png "Rendered by QuickLaTeX.com")
 og
og  modarbejder hinanden. Igen her er det gældende, at du trækker den mindste værdi fra den største.
modarbejder hinanden. Igen her er det gældende, at du trækker den mindste værdi fra den største.
Herefter kan den samlede effekt (tilsyneladende effekt) beregnes. Det er den effekt vi dimensionere anlæg efter.
![\begin{align*} &S=U*I \ [VA] \\ &S=\sqrt{P^2+Q^2} \ [VA] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-669b7a5a60099f4c909e73fd433496b0_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte effekter kan beregnes ud fra effektloven.
![\begin{align*} &\vec P=\vec U_R*\vec I^* \ [W] \\ &\vec Q_L=\vec U_L*\vec I^* \ [var] \\ &\vec Q_C=\vec U_C*\vec I^* \ [var] \\ &\vec Q=\vec Q_L+\vec Q_C=(\vec U_L+ \vec U_C)*\vec I^* \ [var] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-1f7a5a7e70fb5abac969fd42532cce90_l3.png "Rendered by QuickLaTeX.com")
Herefter kan den samlede effekt (tilsyneladende effekt) beregnes. Det er den effekt vi dimensionere anlæg efter.
![\begin{align*} &\vec S=\vec U*\vec I^* \ [VA] \\ &\vec S=\vec P+\vec Q=\vec P+\vec Q_L+\vec Q_C\ [VA] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-21cd0c7b9554c0c976a77762b5117e73_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Det var en gennemgang af formler til beregning af værdier i en serieforbindelse. Herunder finder du eksempler på beregninger med rigtige værdier.
Beregningseksempler
Eksempel 1: Beregning af spændingsfaldende

En spole, en kondensator og en resistans tilsuttes i serie. Der måles et spændingsfald på 120Volt over resistansen (), 90 Volt over spolen () og 30 Volt over kondensatoren () (Det antages at spole og kondensator er rene spole og kondensator effekter). Hvor stor er den samlede spændingsfald og dermed den påtrykte spænding?
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
For at beregne den samlede spændingsfald, skal vi først klarlægge om det er en induktiv eller kapacitiv belastning. Da vi har en større spændingsfald over end må belastningen være induktiv. Derved trækker vi den kapacitive belastning fra den induktive.
Derved beregner vi spændingsfaldet på følgende måde:
![\begin{align*} &U=\sqrt{U_R^2+(U_L-U_C)^2} \\ &\Updownarrow \\ &U=\sqrt{120^2+(90-30)^2}=134,16 \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-cf69e6498e53cb0c4f4349434cc2ce49_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Vektorielt lægges alle spændingerne sammen med vinklerne.
![\begin{align*} &\vec U=\vec U_R+\vec U_L+\vec U_C \\ &\Updownarrow \\ &U=(120 \angle 0^{\circ})+(90 \angle 90^{\circ})+(30 \angle -90^{\circ})=134,16 \ [V] \angle 26,57 ^{\circ} \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-63d738299097cfa7ab36652bbda1db57_l3.png "Rendered by QuickLaTeX.com")
Da vi ender ud med en positiv vinkel, kan vi konkluderer, at det er en induktiv belastning vi har.
[/su_tab][/su_tabs]
Eksempel 2: Beregning af et induktiv kredsløb

En serieforbindelse med en resistans på 1250 ohm, to induktanser på henholdsvis 3 og 2 Henry og en kapacitans på 35 mikro fahrad er tilsuttet et 50 hz 230 Volts net. Det antages at spolerne er rene induktive belastninger. Beregn spændingsfaldene, strømmen, effekterne, reaktanserne, resistanserne og impedanserne. Beregn derudover kredsløbets faseforskydningsvinkel og cosphi.
Da vi har opgivet frekvens, spænding, resistansen, induktanserne og kapacitansen, er første skridt at få beregnet en samlet impedans. Det kræver, at vi kender reaktanserne. Derfor beregner vi først disse:
![\[X_{L1}=2\pi*f*L_1=2*\pi*50*3=942,48 [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-36f13282f42c330169daf29983e597c6_l3.png "Rendered by QuickLaTeX.com")
![\[X_{L2}=2\pi*f*L_2=2*\pi*50*2=628,32 [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-d8b1e3166ff0313ed9a9e61ffa327fb9_l3.png "Rendered by QuickLaTeX.com")
De induktive reaktanser har en forskydning på 90 grader. Hvilket skal bruges ved vektorielt beregning.
![\[X_C=\frac{1}{2\pi*f*C}=\frac{1}{2\pi*50*35*10^{-6}}=90,95 [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-8749e5158f8984a67cc640235db9b746_l3.png "Rendered by QuickLaTeX.com")
Den kapacitive reaktans har en faseforskydning på -90 grader.
Vi har nu beregnet alle reaktanser, og har samtidig resistansen opgivet. Derved kan vi beregne vores impedans, da alle øvrige parameter i impedanstreakanten er kendt.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Ved hurtig at skimte reaktanternes størrelse kan vi konkludere, at den induktive del er større end den kapacitive del. Derved trækkes den kapacitive reaktans fra den induktive.
![\begin{align*} &Z=\sqrt{R^2+(X_{L1}+X_{L2}-X_C)^2} \\ &\Updownarrow \\ &Z=\sqrt{1250^2+(942,48+628,32-90,95)^2}=1937,13 \ [\Omega] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-8fabfd5b339d140912745461ab1d6912_l3.png "Rendered by QuickLaTeX.com")
Vi kan nu beregne kredsløbets faseforskydning og cosphi:

[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Ved beregning vektorielt, kan alle reaktanserne og resistansen lægges sammen med vinklerne.
![\begin{align*} &\vec Z=\vec R+\vec X_{L1}+\vec X_{L2}+\vec X_C \\ &\Updownarrow \\ &\vec Z=(1250\angle 0^{\circ})+(942,48\angle 90^{\circ})+(628,32 \angle 90^{\circ})+(90,95\angle -90^{\circ}) \\ &\Updownarrow \\ &\vec Z=1937,13 \ [\Omega]\angle 49,81^{\circ} \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-9eeffb119b6a517b96ba97377c93f19a_l3.png "Rendered by QuickLaTeX.com")
Ud fra vinklen i overstående beregning kan cos beregnes.
beregnes.
![\[cos\phi=cos(49,81)=0,6453\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-0d8bd429e181ce13019423d4a4f5821d_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Ud fra Ohms lov kan vi konkludere, at hvis strømmen, der er referencepunktet, er placeret i 0 grader, så er spændingens faseforskydning lig med impedansen faseforskydning. Når man gange to værdier, lægges vinklerne sammen. Dette kan eksempelvis udtrykkes på følgende måde:
![\[U=I*Z \Leftrightarrow \angle U=\angle I + \angle Z=0+\angle Z=\angle Z\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-0f7be172d8bfa0740071ede56daa2a58_l3.png "Rendered by QuickLaTeX.com")
Vi kan herefter beregne kredsløbets strøm ud fra Ohms lov
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\[I=\frac{U}{Z}=\frac{230}{1937,13}=0,12 [A]$\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-91fb8711b93a247ccff93813cce74837_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\[\vec I=\frac{\vec U}{\vec Z}=\frac{230\angle 49,81^{\circ}}{1937,13\angle 49,81^{\circ}}=0,12 [A] \angle 0^{\circ}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-bebfabfc21ccdb7405cf27047ce99a0f_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Herefter kan de enkelte spændingsfald over komponenterne beregnes. Det gøres igen med Ohms lov:
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} &U_R=I*R=0,12*1250=148,40 \ [V] \\ &U_{L1}=I*X_{L1}=0,12*942,48=111,90 \ [V] \\ &U_{L2}=I*X_{L2}=0,12*628,32=74,60 \ [V] \\ &U_C=I*X_C=0,12*90,95=10,80 \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-3a08611e3b022420f7a57985ab4ece9a_l3.png "Rendered by QuickLaTeX.com")
Vi kan herefter kontrollere os selv, ved at beregne den påtrykte spændingsfald, hvilket er den samme som den samlede spændingsfald.
![\begin{align*} &U=\sqrt{U_R^2+(U_{L1}+U_{L2}-U_C)^2} \\ &\Updownarrow \\ &U=\sqrt{148,40^2+(111,90+74,60-10,80)^2}=230 \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-626245c0f8579cf46d9482d561a6bb1a_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} &\vec U_R=\vec I*\vec R=(0,12\angle 0^{\circ})*(1250\angle 0^{\circ})=148,40 \ [V] \angle 0^{\circ} \\ &\vec U_{L1}=\vec I*\vec X_{L1}=(0,12\angle 0^{\circ})*(942,48\angle 90^{\circ})=111,90 \ [V] \angle 90^{\circ} \\ &\vec U_{L2}=\vec I*\vec X_{L2}=(0,12\angle 0^{\circ})*(628,32\angle 90^{\circ})=74,60 \ [V] \angle 90^{\circ} \\ &\vec U_C=\vec I*\vec X_C=(0,12\angle 0^{\circ})*(90,95\angle -90^{\circ})=10,80 \ [V] \angle -90^{\circ} \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-b2d5ded02adafb09c3dfbd771930b7e5_l3.png "Rendered by QuickLaTeX.com")
Vi kan herefter kontrollere os selv, ved at beregne den påtrykte spændingsfald, hvilket er den samme som den samlede spændingsfald.
![\begin{align*} &\vec U=\vec U_R+\vec U_{L1}+\vec U_{L2}+\vec U_C \\ &\Updownarrow \\ &\vec U=(148,40\angle 0^{\circ})+(111,90\angle 90^{\circ})+(74,60\angle 90^{\circ})+(10,80\angle -90^{\circ}) \\ &\Updownarrow \\ &\vec U=230 \ [V] \angle 49,81^{\circ} \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-07a584f8cde1c8d3b61f8fd0b20369cc_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Derved får vi de opgivet 230V og den samme vinkel som beregnet tidligere. Derved kan vi konstaterer at vores beregninger er korrekte.
Det sidste vi mangler er at beregne vores effekter i kredsløbet.
Vi kan beregne de enkelte effekter, og lægge den sammen efterfølgende. Vi kan også – ud fra strøm og spænding – beregne den samlede effekt for hele kredsløbet.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} &P=U_R*I=148,40*0,12=17,62 \ [W] \\ &Q_ {L1}=U_{L1}*I=111,90*0,12=13,27 \ [var] \\ &Q_ {L2}=U_{L2}*I=74,60*0,12=8,86 \ [var] \\ &Q_ C=U_C*I=10,80*0,12=1,28 \ [var] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-ef4d4dbec992a0bd9df4e33919ef36c1_l3.png "Rendered by QuickLaTeX.com")
Derved kan de tilsyneladende effekt beregnes på følgende to måder:
![\begin{align*} & S=\sqrt{P^2+(Q_{L1}+Q_{L2}-Q_C)^2} \\ &\Updownarrow \\ & S=\sqrt{17,62^2+(13,27+8,86-1,28)^2}=27,30 \ [VA] \\ \\ & S=U*I=230*0,12=27,3 \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-952ec3aca01deb2dec4ee29c658ad891_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} & \vec P=\vec U_R*\vec I^*=(148,40 \angle 0^\circ)*(0,12\angle 0^\circ)=17,62 \ [W]\angle 0^\circ \\ & \vec Q_ {L1}=\vec U_{L1}*\vec I^*=(111,90\angle 90^\circ)*(0,12\angle 0^\circ)=13,27 \ [var]\angle 90^\circ \\ & \vec Q_ {L2}=\vec U_{L2}*\vec I^*=(74,60\angle 90^\circ)*(0,12\angle 0^\circ)=8,86 \ [var]\angle 90^\circ \\ & \vec Q_ C=\vec U_C*\vec I^*=(10,80\angle -90^\circ)*(0,12\angle 0^\circ)=1,28 \ [var]\angle -90^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-34eb5853211a74a829666d2e670ff288_l3.png "Rendered by QuickLaTeX.com")
Derved kan de tilsyneladende effekt beregnes på følgende to måder:
![\begin{align*} &\vec S=\vec P+\vec Q_{L1}+\vec Q_{L2}+\vec Q_C \\ &\Updownarrow \\ &\vec S=(17,62\anlge 0^{\circ})+(13,27\anlge 90^{\circ})+(8,86\anlge 90^{\circ})+(1,28\anlge -90^{\circ}) \\ &\Updownarrow \\ &\vec S=27,30 \ [VA] \anlge 49,81^\circ \\ &\\ &\vec S=\vec U*\vec I^*=(230\angle 49,81^\circ)*(0,12\angle 0^\circ)=27,30 \ [VA] \angle 49,81^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-55bd49b6a918c83fcea702d51b12c9a4_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Derved har vi beregnet alle parameter i eksemplet.

[su_related_post_in_text][bibblio style=” bib–white-label bib–row-4 bib–title-only bib–portrait bib–square” query_string_params=e30=][/su_related_post_in_text]
Parallelforbindelse
Ved parallelforbindelser er det ikke strømmen, der er den faste værdi, men derimod spændingen. Det betyder også, at spændingen nu er vores reference. For at gøre det nemt for os selv, antager vi, at spændingen altid ligger i 0 grader. Begynder vi at beregne på blandede forbindelser, vil spændingen ikke altid nødvendigvis være i 0 grader.
Beregning af spænding i vekselstrøms parallelforbindelser
Hvis vi har ikke har fået vores spænding opgivet, er vi nød til at beregne denne. Den er nemlig en af de vigtige parameter, da den er ens for alle komponenter. Kender vi blot to elementer, effekt, strøm eller resistans/reaktans, for et komponent, har vi mulighed for at beregne den samlede spændingsfald. Den samlede spændingsfald er samtidig lig med spændingsfaldet over alle komponenterne.
Vi kan derved beregne spændingen på en af følgende måder:
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Ved kendt modstand og strøm
![\begin{align*} &U=U_R=I_R*R \ [V] \\ &U=U_L=I_L*X_L \ [V] \\ &U=U_C=I_C*X_C \ [V] \\ &U=I*Z \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-db4248377eb353122ed2042d274fbcfa_l3.png "Rendered by QuickLaTeX.com")
Ved kendt effekt og strøm
![\begin{align*} &U=U_R=\frac{P}{I_R} \ [V] \\ &U=U_L=\frac{Q_L}{I_L} \ [V] \\ &U=U_C=\frac{Q_C}{I_C} \ [V] \\ &U=\frac{S}{I} \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-7a3ebf7f500a3a5431411f19058f344d_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Ved kendt modstand og strøm
![\begin{align*} &\vec U=\vec U_R=\vec I_R*\vec R \ [V] \\ &\vec U=\vec U_L=\vec I_L*\vec X_L \ [V] \\ &\vec U=\vec U_C=\vec I_C*\vec X_C \ [V] \\ &\vec U=\vec I*\vec Z \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-b7e917f40d31e4a1653965e8709e7065_l3.png "Rendered by QuickLaTeX.com")
Ved kendt effekt og strøm
![\begin{align*} &\vec U=\vec U_R=\frac{\vec P}{\vec I_R^*} \ [V] \\ &\vec U=\vec U_L=\frac{\vec Q_L}{\vec I_L^*} \ [V] \\ &\vec U=\vec U_C=\frac{\vec Q_C}{\vec I_C^*} \ [V] \\ &\vec U=\frac{\vec S}{\vec I^*} \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-11cbc1e63aa43dbc120e0da5f5d8f495_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Beregning af strøm i vekselstrøms parallelforbindelser
Når vi snakker parallelforbindelse, har vi ikke længere en fast strøm. Strømmen deler og samler sig i de forskellige knudepunkter i en parallelforbindelse. Dermed kan vi beregne de forskellige strømme, og efterfølgende lægge dem sammen. Den samlede strøm findes ved at beregne den ud fra at strømmene er forskudt i henhold til figur 22.
Vinklerne på strømmen gennem resistansen er 0 grader, fordi en ren resistans ikke forskyder strøm og spænding. Vinklen på strømmen gennem spole er -90 grader, grundet strømmen er forsinket i forhold til spænding. Til sidst er vinklen på strømmen gennem kondensatoren +90 grader, grundet strømmen er 90 grader foran. Bemærk at strømmens vinkel fortegn altid er modsat af, hvad fortegnet er ved spænding og modstande. Dette skyldtes, at vi har spænding som reference fremfor strømmen.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte strømme beregnes på følgende måde
![\begin{align*} &I_R=\frac{U}{R} \ [A] \\ &I_L=\frac{U}{X_L} \ [A] \\ &I_C=\frac{U}{X_C} \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-0f5574d6baa7acd2799e609b81016ca9_l3.png "Rendered by QuickLaTeX.com")
Den samlede strøm kan beregnes på følgende to måder:
![\begin{align*} &I=\frac{U}{Z} \ [A] \\ &I=\sqrt{I_R^2+(I_L-I_C)^2} \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-eced726c4025dff6ddc045ebe6f9e5dd_l3.png "Rendered by QuickLaTeX.com")
Den mindste strøm af den kapacitive og induktive del trækkes fra den den anden.
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte strømme beregnes på følgende måde
![\begin{align*} &\vec I_R=\frac{\vec U}{\vec R} \ [A] \\ &\vec I_L=\frac{\vec U}{\vec X_L} \ [A] \\ &\vec I_C=\frac{\vec U}{\vec X_C} \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-07c1636cb7beae842c5de0152136b23c_l3.png "Rendered by QuickLaTeX.com")
Den samlede strøm kan beregnes på følgende to måder:
![\begin{align*} &\vec I=\frac{\vec U}{\vec Z} \ [A] \\ &\vec I=\vec I_R+\vec I_L+\vec I_C \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-67ca40fcf975406a68c364bf467b67af_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Beregning af impedans og reaktans i vekselstrøms parallelforbindelser
For at beregne de forskellige reaktanser i kredsløbet, gør vi som vi gjorde ved serieforbindelser, og beregner den ud fra induktansen og kapacitansen.
Herefter bliver det en anderledes fremgangsmåde end serieforbindelse. Da vi normalt beregner modstanden ved hjælp af en reciprok værdi, er det svært at overføre det til trekantsberegninger. Derfor er vores eneste måde at beregne den samlede impedans på ved at anvende Ohms lov. Fremgangsmåden er derfor, at du skal beregne spændingsfaldet over en af komponenter, som så er lig med spændingsfald over de øvrige komponenter. Derefter skal vi have beregnet den samlede strøm, før det er muligt at beregne impedansen.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af impedansen ud fra Ohms lov:
![\[Z=\frac{U}{I} \ [\Omega] \]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-c6c3eeadfe18c8bfa10aed26274f635a_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af impedansen ud fra Ohms lov:
![\[\vec Z=\frac{\vec U}{\vec I} \ [\Omega] \]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-c9225c6c0e7a1919a433372a99af1595_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Beregning af effekter
Til sidst skal vi have beregnet effekterne. Fremgangsmåden er den samme som ved serieforbindelse, men bliver forklaret her igen. Effekter deles op i tre grupper: Virkeeffekt (P), reaktiv effekt (Q) og tilsyneladende effekt (S). Virkeeffekten er den effekt en resistans optager. Reaktiv effekten er resultatet af den kapacitive og induktive effekt. De modvirker hinanden og derfor kan den reaktiv effekt minimeres, hvis du justerer enten spole- eller kondensatorstørrelsen. Den tilsyneladende effekt er resultatet af alle effekterne lagt sammen vektorielt.
For at beregne på effekter, kan vi igen anvende trekanten på figur 23, og fremgangsmåden er derved ens med det vi lærte tidligere. Hvordan vi beregner de forskellige effekter kan ses herunder:
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte effekter kan beregnes ud fra effektloven.
![\begin{align*} &P=U*I*cos\phi=U*I_w \ [W] \\ &Q_L=U*I_L \ [var] \\ &Q_C=U*I_C \ [var] \\ &Q=Q_L-Q_C=U*I*sin\phi=U*I_{wl} \ [var] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-dd25b86b47729a86443a2ed604903eda_l3.png "Rendered by QuickLaTeX.com")
og modarbejder hinanden. Igen her er det gældende, at du trækker den mindste værdi fra den største.
Herefter kan den samlede effekt (tilsyneladende effekt) beregnes. Det er den effekt vi dimensionere anlæg efter.
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
De enkelte effekter kan beregnes ud fra effektloven.
![\begin{align*} &\vec P=\vec U*\vec I_w^* \ [W] \\ &\vec Q_L=\vec U*\vec I_L^* \ [var] \\ &\vec Q_C=\vec U*\vec I_C^* \ [var] \\ &\vec Q=\vec Q_L+\vec Q_C=\vec U*(\vec I_{wl}^* \ [var] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-ec92979610322be5a05af2ce4207e7b4_l3.png "Rendered by QuickLaTeX.com")
Herefter kan den samlede effekt (tilsyneladende effekt) beregnes. Det er den effekt vi dimensionere anlæg efter.
[/su_tab][/su_tabs]
Herved er teorien for parallelforbindelser beregnet, og vi kan nu gå videre til eksemplerne.
Beregningseksempler

Eksempel 1: Beregning af strømmene
En parallelforbindelse med en resistans, en induktans og en kapacitans er tilkoblet en vekselstrømskreds. Strømmen gennem resistansen er 2 ampere, igennem induktansen er 1,1 ampere og igennem kapacitansen er 0,5 ampere. Hvad er parallelforbindelsen samlede strøm?
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Da strømmene er forskudt, anvendes pythagoras for at finde resultatet
![\begin{align*} &I=\sqrt{I_R^2+(I_L-I_C)^2} \\ &\Updownarrow \\ &I=\sqrt{2^2+(1,1-0,5)^2}=2,09 \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-fbd5c5039b9070462abc98d1909f756e_l3.png "Rendered by QuickLaTeX.com")
Bemærk at den induktive strøm er størst, og derved trækkes den kapacitive fra den induktive strøm.
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Strømmen lægges sammen vektorielt, da de er forskudt i forhold til hinanden.
![\begin{align*} &\vec I=\vec I_R+\vec I_L+\vec I_C \\ &\Updownarrow \\ &I=(2 \angle 0^\circ)+(1,1 \angle -90^\circ)+(0,5\angle 90^\circ)=2,09 \ [A] \angle -16,70^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-c8b90d99ff7095369543d8312190c7a6_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Eksempel 2: Beregning af værdierne i en parallelforbindelse

Der er koblet en resistans på 45 Ohm, en induktans på 80 mili Henry og en kapacitans på 318 mikro Farad. Beregn strømmene, effekterne og spændingerne, når der løber en strøm på 10 ampere igennem kondensatoren. Frekvensen er 50 Hz
I dette eksempel har vi meget få oplysninger opgivet. Vi har oplysning om alle komponenterne, samt en strøm. Derved kan vi beregne alle reaktanser. Impedansen kan ikke beregnes før vi kender strømmen, da vi ikke kan lægge den sammen vektorielt grundet den specielle måde, hvorpå modstande lægges sammen i parallelforbindelse.
Først beregnes alle reaktanserne
![\[X_L=2\pi*f*L=2\pi*50*80*10^{-3}=25,13 \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-f7054635625b030e55b700225351efd4_l3.png "Rendered by QuickLaTeX.com")
![\[X_C=\frac{1}{2\pi*f*C}=\frac{1}{2\pi*50*318*10^{-6}}=10 \[\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-2d6fe9b6b2c5773d3c82ce60bbf7f11a_l3.png "Rendered by QuickLaTeX.com")
Herefter kan vi beregne spændingen over alle komponenter, der også er lig med den påtrykte spænding. Dette kan vi, da vi kender strømmen gennem kondensatoren, og vi samtidig ved at spændingen er ens i en parallelforbindelse.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning efter Ohms lov
![\[U=I_C*X_C=10*10=100 \ [V] \]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-ef5278e3d29329fee549cc3fa26b4946_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning efter Ohms lov
![\[\vec U=\vec I_C*\vec X_C=(10 \angle -90^\circ)*(10\angle 90^\circ)=100 \ [V] \angle 0^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-5154100a1661f12b9d2916b6494ea71d_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Herefter kan vi beregne alle strømmene.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af de enkelte strømme
![\begin{align*} &I_R=\frac{U}{R}=\frac{100}{45}=2,22 \ [A] \\ &I_L=\frac{U}{X_L}=\frac{100}{25,13}=3,98 \ [A] \\ &I_C=\frac{U}{X_C}=\frac{100}{10}=10 \ [A] \\ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-fdb71224a2f8286c6ec86e9fdbe5a2c4_l3.png "Rendered by QuickLaTeX.com")
Beregning af den samlede strøm
![\[I=\sqrt{I_R^2+(I_C-I_L)^2}=\sqrt{2,22^2+(10-3,98)^2}=6,42 \ [A] \]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-2a267df77ee31c68213a9744a551b454_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af de enkelte strømme
![\begin{align*} &\vec I_R=\frac{\vec U}{\vec R}=\frac{100\angle 0^\circ}{45 \angle 0^\circ}=2,22 \ [A]\angle 0^\circ \\ &\vec I_L=\frac{\vec U}{\vec X_L}=\frac{100 \angle 0^\circ}{25,13 \angle 90^\circ}=3,98 \ [A] \angle -90^\circ \\ &\vec I_C=\frac{\vec U}{\vec X_C}=\frac{100 \angle 0^\circ}{10 \angle -90^\circ}=10 \ [A] \angle 90^\circ\\ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-a49a4db96ddf296b9a6ac69443b1dce4_l3.png "Rendered by QuickLaTeX.com")
Beregning af den samlede strøm
![\begin{align*} &\vec I=\vec I_R+\vec I_L+\vec I_C \\ &\Updownarrow \\ &\vec I=(2,22 \angle 0^\circ)+(3,98\angle -90^\circ)+(10\angle 90^\circ)=6,42 \ [A] \angle 69,76^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-1fc09bc03ce0c228d3d495ecb0847f8a_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Til sidst beregner vi impedansen:
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af Impedansen ud fra Ohms lov
![\[Z=\frac{U}{I}=\frac{100}{6,42}=15,58 \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-abcd16181fd332ea9c22112d07150a7a_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af Impedansen ud fra Ohms lov
![\begin{align*} &\vec Z=\frac{\vec U}{\vec I} \\ &\Updownarrow \\ &\vec Z=\frac{100\angle 0^\circ}{6,42\angle 69,76^\circ}=15,58 \ [\Omega]\angle -69,76^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-27b12efdea9a890cebfb81fbd8774eb7_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Opgaven er hermed løst.
[su_related_post_in_text][bibblio style=” bib–white-label bib–row-4 bib–title-only bib–portrait bib–square” query_string_params=e30=][/su_related_post_in_text]

Blandede forbindelser
Har vi en blanding af parallel- og serieforbindelse, har vi en blandet forbindelse. For at beregne kredsløbet, gælder det om at dele kredsløbet op for at øge overskueligheden af kredsløbet. Når vi beregner blandede forbindelser, er der som altid mange forskellige muligheder for at beregne kredsløbet. Jeg vil igen forklare vektorielt beregning, og trekantsberegninger.
Tager vi udgangspunktet i kredsløbet på figur 26, har vi en spole og en modstand i serie med hinanden. De er parallel med en kondensator og modstand i serie. Derved har vi to serieforbindelser i parallel med hinanden. Derved kan vi hurtig konkludere, at strømmen gennem  og
og  er ens, og at strømmen igennem
er ens, og at strømmen igennem og
og  er ens. Derudover ved vi, at den påtrykte spænding er lig med summen af spændingsfaldet over og samt summen af og .
er ens. Derudover ved vi, at den påtrykte spænding er lig med summen af spændingsfaldet over og samt summen af og .
Beregning af reaktans og impedanserne
Vi kan oftest starte med at beregne alle reaktanserne i kredsløbet. Dette gøres som tidligere nævnt.
Kender vi samtidig de to modstand størrelser, kan vi beregne impedansen i hver serie. Vi kan ikke lægge de to impedanser sammen almindeligvis, da de er parallelforbundet. Derved skal vi beregne det ud fra den reciprokke værdi, hvilket er vanskelig med vinkler. Derfor beregner vi den samlede impedans senere, når
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af impedanserne, samt deres faseforskydningsvinkel ved hjælp af pythagoras:

[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af impedansen og faseforskydningsvinkel i en formel ved hjælp af vektorielt beregning:

[/su_tab][/su_tabs]
Beregning af strømmene i blandede forbindelser
For at beregne strømmene i de enkelte parallelforbindelser, skal vi kende enten den påtrykte spænding, eller spændingsfaldet over et komponent i hver serie. Herved kan du ved hjælp af Ohms lov beregne strømmene i hver serie. Dette vel se ud som følgende:
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Strøm i serien af kondensator og :

Strøm i serien af spolen og :

[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Strøm i serien af kondensator og :

Strøm i serien af spolen og :

[/su_tab][/su_tabs]
Her skal vi bemærke, at vinklen på henholdsvis strøm 1 og 2 er modsat rettet. Dette skyldtes, at der i den ene kreds er en spole, der har en negativ strømvinkel, og at der i den anden er en kondensator, der har en positiv strømvinkel. Vinklen for strømmene er den modsatte af cosp. Derfor er en spolens impedans vinkel +90 grader, hvor dens strøm er -90 grader.
Har vi de to strømme, kan vi nu beregne den samlede strøm i kredsløbet.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
For at beregne strømmene, skal vi have delt strømmene og i watt og wattløse komponenter. For at gøre det, skal vi kende vinklen på strømmen i hver kreds. Da vi har faseforskydningsvinkel fra impedansen, kan vi anvende denne til opdeling af strømmen.

Herefter kan de to wattstrømme lægges sammen, og derefter de wattløsestrømme. Man skal være opmærksom på de wattløse strømme kan være induktive og kapacitive. Derfor skal kapacitive strømme have modsat fortegn, hvis den er mindre end den induktive strøm.

Herefter kan vi beregne den samlede strøm ud fra pythagoras.
![\[I=\sqrt{I_w^2+I_{wl}^2}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-460ec896fcad289e5dcedeb263ece39f_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning vektorielt er langt nemmere end beregning efter pythagoras. Her kræver det kun en enkelt beregning for at finde resultatet. Du er derfor ikke nød til at dele komponenterne op.
![\[\vec I=\vec I_1+\vec I_2\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-87e617b19df5d5e29d5664ee2126507e_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Beregning af spænding
I en blandet forbindelse kan du have forskellige spændinger du skal beregne. Du kan ved hjælp af Ohms lov beregne de enkelte spændingsfald eller den samlede spændingsfald.
Tager vi udgangspunkt i figur 26, vil vi kunne beregne de forskellige spændingsfald på følgende måde:
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af spændingsfald over komponenterne

Beregning af den samlede spændingsfald og dermed den påtrykte spænding.

[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af spændingsfald over komponenterne
Beregning af den samlede spændingsfald og dermed den påtrykte spænding.

[/su_tab][/su_tabs]
Beregning af den samlede impedans
Den samlede impedans kan ganske enkelt beregnes ud fra Ohms lov. Hvis du kender den samlede strøm og den samlede spænding, kan impedansen beregnes.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af impedansen ud fra Ohms lov.
![\[Z=\frac{U}{I}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-68f3cb071f50d008477e0c70c44e1d7c_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af impedansen ud fra Ohms lov.
![\[\vec Z=\frac{\vec U}{\vec I}\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-36741e7be1bad3e039356224864f0bd3_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Beregning af effekter
Til sidst kan effekterne i en blandet forbindelse også beregnes. For at beregne effekterne, kan dette gøres ved beregning af de enkelte effekter, eller ved beregning af den samlede effekt. Igen har vi tre forskellige effekter. Den reaktiveffekt, virkeeffekt og den tilsyneladende effekt.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af effekter:
![\begin{align*} &P=U*I*cos\phi \ [W] \\ &Q=U*I*sin\phi \ [var] \\ &S=U*I \ [VA] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-fe1dc2bf9c6df1bfc497709c4f6c7a43_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af effekter:
![\begin{align*} &P=U*I*cos\phi \ [W] \\ &Q=U*I*sin\phi \ [var] \\ &\vec S=\vec U* \vec I \ [VA] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-3c28e31752e128dcfddc76d70ea7468d_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Beregningseksempel

Eksempel 1: Løsning af en simpel blandet forbindelse
Beregn alle værdierne i kredsløbet.
Vi har et kredsløb med spoler, kondensator og tre modstande. For at kunne beregne de blandede forbindelser, skal vi dele kredsløbet op i serie- og paralleforbindelse, og anvender reglerne for dette. En hurtig overblik kan vi se, at R1 er i serie med parallelforbindelsen Xc, R1+X_L og R3.
Vi har opgivet spændingsfaldet over R3. Da der i parallelforbindelser er samme spændingsfald over komponenterne, ved vi allerede nu, at der er 200V over R3, R2+XL og XC. Derudover ved vi, at den samlede strøm i kredsløbet gennemløber R1. Samtidig ved vi fra serieforbindelse reglerne, at der foregår et spændingsfald over R1.
Vi starter med at beregne strømmen gennem R3, da vi har både modstandværiden og spændingsfaldet opgivet:
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\[I_{3}=\frac{U_{R3}}{R_3}=\frac{200}{100}=2 \[A]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-7d891183702e7652467a973db2c72bd0_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\[\vec I_{3}=\frac{\vec U_{R3}}{\vec R_3}=\frac{200\angle 0^\circ}{100\angle 0^\circ}=2 \ [A] \angle 0^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-de42c9f4f5170a42025b4e3303d299c5_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
For at beregne kredsløbet skal de to reaktanser beregnes, hvorefter impedanse af og kan berenges.
![\[X_C=\frac{1}{2\pi*f*C}=\frac{1}{2\pi*50*318*10^{-6}}=10,01 \[\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-ee20529d6b46b58b054cccb2b8c96fad_l3.png "Rendered by QuickLaTeX.com")
Herefter beregnes impedansen af og
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} &Z_2=\sqrt{R_2^2+X_L^2}=\sqrt{55^2+25,13^2}=60,47 \ [\Omega] \\ &\angle \phi=cos^{-1}(\frac{R_2}{Z_2}=cos^{-1}(\frac{55}{60,47}=24,56^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-f0c6d73f2675817e8ad52ab814156cfa_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\[\vec Z_2=\vec R_2+\vec X_L=(55 \angle 0^\circ)+(25,13 \angle 90^\circ)=60,47 \ [\Omega] \angle 24,56^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-2b303febfa3890db392700c312dd97fe_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Herefter kan vi beregne de to strømme gennem henholdsvis , samt og .
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\[I_C=\frac{U_{R3}}{X_C}=\frac{200}{10,01}=19,98 \ [A]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-aa910d7644f780df85573031738bf8b4_l3.png "Rendered by QuickLaTeX.com")
Vi ved, at en ren kapacitiv strøm altid har en vinkel på +90 grader i forhold til spændingen over den.
![\[I_2=\frac{U_{R3}}{Z_2}=\frac{200}{60,47}=3,31 \[A]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-50857938c181ca8a6283b15cac507aa1_l3.png "Rendered by QuickLaTeX.com")
Vinklen på strømmen er faseforskydningsvinkel med modsat fortegn. Derved er vinklen -24,56 grader.
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} & \vec I_C=\frac{\vec U_{R3}}{\vec X_C}={200 \angle 0^\circ}{10,01 \angle -90^\circ}=19,98 \ [A] \angle 90^\circ \\ & \vec I_2=\frac{\vec U_{R3}}{\vec Z_2}=\frac{200 \angle 0^\circ}{60,47 \angle 24,56^\circ}=3,31 \ [A] \angle -24,56^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-9c0a04ccb65cd0e5332a04b670fc1034_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Herved har vi alle strømmene i parallelforbindelsen, og derved kan de lægges sammen. Derved ved vi, fra serieforbindelsen, at den strøm der kommer til et knudepunkt er lig den der forlader knudepunktet. Derfor kan vi konkluderer, at den strøm der går gennem R1 er lig den samlede af parallelforbindelsen. Den er samtidig kredsløbets samlet strøm.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Skal det lægges sammen almindeligvis skal strømmene deles op i watt og wattløse strømme.
![\begin{align*} &I_{w2}=I_2*cos\phi=3,31*cos(24,56)=3,01 \[A] \\ &I_{wl2}=I_2*sin(\phi)=3,31*sin(24,56)=1,37 \ [A] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-c041a9225cd3826ce634ca98a859a0ce_l3.png "Rendered by QuickLaTeX.com")
Da  er ren watt strøm og
er ren watt strøm og  er watt delen af og kan de lægges sammen almindeligvis.
er watt delen af og kan de lægges sammen almindeligvis.
![\[ I_w=I_{w3}+I_{w2}=2+3,01=5,01 \ [A]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-6d438fdce971e506ec5827b9b4389e17_l3.png "Rendered by QuickLaTeX.com")
Samtidig kan de wattløse strømme lægges sammen. Da den ene er en induktiv strøm og den anden en kapacitiv strøm, modarbejder de hinanden.
![\[I_{wl}=I_{wl2}-I_C=1,37-19,98=-18,61 \ [A]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-edb1775d5058ce4fd059c240dd5b988b_l3.png "Rendered by QuickLaTeX.com")
Vi har derved en kapacitiv strøm. Vi ændrer fortegn på strømmen, og husker den er kapacitiv.
![\[ I=\sqrt{I_w^2+I_{wl}^2}=\sqrt{5,01^2+18,61^2}=19,27 \ [A] \]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-b7df500cb19cf800ced0ac435595cb00_l3.png "Rendered by QuickLaTeX.com")
Da vores kapacitiv strøm var størst, er kredsløbet kapacitiv. Vi kan beregne vinklen på strømmen ved følgende måde:
![\[ \angle I=cos^{-1}(\frac{I_w}{I})=cos^{-1}(\frac{5,01}{19,27})=74,93^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-96e0ad0333887e6b394ca5e1b0b14814_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Ved vektorielt beregning er sammenlægning af strømme nemmere end ved almindelig beregning, der anvendes på erhvervsskolerne. Dette skyldtes, at der er færre beregninger. Derfor skal du ikke dele strømmene op i watt- og wattløsestrømme. Du kan blot lægge dem sammen med vektorer.
![\begin{align*} &\vec I=\vec I_1=\vec I_C+\vec I_2+\vec I_3 \\ &\Updownarrow \\ &\vec I=(19,98/ \angle 90^\circ)+(3,31\angle -24,56^\circ)+(2 \angle 0^\circ)=19,27 \ [A] \angle 74,93^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-a59fd6b7f3bd003838b1f5460ad63090_l3.png "Rendered by QuickLaTeX.com")
Vi kan ud fra vinklen konkluderer at strømmen er kapacitiv, da vi har en positiv vinkel.
[/su_tab][/su_tabs]
Hermed er alle strømmene i kredsløbet beregnet, og vi kan nu beregne spændingsfaldene.
Da vi har R1 modstanden og strømmen igennem denne, kan vi beregne spændingsfaldet over den.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af spændingsfaldet over
![\[U_{R1}=I*R_1=19,27*45=867,06 \ [V]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-6b6dcbae1cd69e04aa4cfa7b782e6f25_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af spændingsfaldet over
![\[\vec U_{R1}=\vec I*\vec R_1=(19,27\angle 74,93^\circ)*(45\angle 0^\circ)=867,06 \ [V] \angle 74,93^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-befdac6332d4baacc208ec683464b5d8_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Vi har en forskudt strøm i serieforbindelsen her, grundet den efterfølgende parallelforbindelse har forskudt strømmen. Da vi startede beregningerne valgte vi, at  var vores referencepunkt. Derfor kan vi nu se, at vores forsyningsspænding har en vinkel, når vi beregner den vektorielt.
var vores referencepunkt. Derfor kan vi nu se, at vores forsyningsspænding har en vinkel, når vi beregner den vektorielt.
For at beregne spændingsfaldene, er vi nød til at beregne en erstatnings impedans for modstand , og reaktanserne og . Dette kan vi ved hjælp af Ohms lov.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af parallelforbindelsens impedans
![\[Z_p=\frac{U_{R3}}{I}=\frac{200}{19,27}=10,38 \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-8060b86b0219751b759e24ce61544844_l3.png "Rendered by QuickLaTeX.com")
Da vi har en spænding i 0 grader, og en strøm med en vinkel på 74,93, er forskellen mellem spænding og strøm 74,93 grader. Da vi skal beregne faseforskydningen skal strømmens fortegn ændres. Derved har vi en kapacitiv impedans med en vinkel på -74,93 grader.
![\[ \anlge \phi_p=-74,93^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-86faea7613e747f4aed011bc57891961_l3.png "Rendered by QuickLaTeX.com")
Nu skal vores impedans deles op i resistans og reaktans.
![\begin{align*} &R_p=Z_p*cos\phi_p=10,38*cos(74,93)=2,70 \ [\Omega] \\ &X_p=Z_p*cos\phi_p=10,38*sin(74,93)=10,02 \ [\Omega] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-05dd21b2e4e79642fc3bd23262d065c4_l3.png "Rendered by QuickLaTeX.com")
Herefter kan vi lægge værdierne sammen med resistansen, og derved har vi den samlede impedans
![\[Z=\sqrt{(R_p+R_1)^2+X_p^2}=\sqrt{(2,7+45)^2+10,02^2}=48,74 \ [\Omega]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-ffa3d9999e448bcca16ed9ea6bbfe1a1_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af parallelforbindelsens impedans
![\begin{align*} &\vec Z_p=\frac{\vec U_{R3}}{\vec I} \\ &\Updownarrow \\ &\vec Z_p=\frac{200 \angle 0^\circ}{19,27 \angle 74,93^\circ}=10,38 \ [\Omega] \angle -74,93^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-3d816a0256d640f2df503e506334a123_l3.png "Rendered by QuickLaTeX.com")
Beregning af den samlede impedans
![\begin{align*} &\vec Z=\vec Z_p+\vec R_1 \\ &\Updownarrow \\ &\vec Z=(\vec 10,38 \angle -74,93^\circ)+(45 \angle 0^\circ)=48,74 \ [\Omega] \angle-11,87^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-53bfca7ab29c31daa6b40a5d994f49aa_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Med den samlede impedans og strøm, kan den påtrykte spænding beregnes.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af den påtrykte spænding
![\[U=I*Z=19,27*48,74=939,14 \[V]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-578fe267dfc3f96191d5c92e869cf09f_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af den påtrykte spænding
![\[\vec U=\vec I*\vec Z=(19,27\angle 74,93^\circ)*(48,74 \angle -11,87<^\circ)=939,14 \[V] \angle 63,06^\circ \]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-6f6305084ad32f8fa05476cce0a275ee_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Herefter mangler vi spændingsfaldene over og . Da modstanden har strøm og spænding i fase, hvorimod spolen () har en forskydning af strømmen 90 grader bagud, vil du have to spændinger der er forskudt.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} &U_L=I_2*X_L=3,31*25,13=83,12 \ [V] \\ &U_{R2}=I_2*R_2=3,31*55=181,91 \ [V] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-4184b5c247364a821253a304e84892bc_l3.png "Rendered by QuickLaTeX.com")
Vi kan kontrollere om resultatet er rigtig ved at lægge de to spændingerne sammen ved hjælp af pythagoras.
![\[U_{R3}=\sqrt{U_{R2}+U_L^2}=\sqrt{181,91^2+83,12^2}=200 \ [V]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-f7230f14f10aac3a9dbeca19e28de0ad_l3.png "Rendered by QuickLaTeX.com")
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
![\begin{align*} &\vec U_L=\vec I_2*\vec X_L=(3,31\angle -24,56^\circ)*(25,13\angle 90^\circ)=83,12 \ [V] \angle 65,44^\circ \\ &\vec U_{R2}=\vec I_2*\vec R_2=(3,31\angle -24,56^\circ)*(55 \angle 0^\circ)=181,91 \[V] \angle -24,56^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-8d6ce270f966c6a773946ce3655351d3_l3.png "Rendered by QuickLaTeX.com")
Vi kan her kontrollere os selv
![\[\vec U_{R3}=\vec U_L+\vec U_{R2}=(83,12 \angle 65,44^\circ)+(181,91 [V] \angle -24,56^\circ)=200 \ [V]\angle 0^\circ\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-21929ebc205164f1ffff78534a67c0e8_l3.png "Rendered by QuickLaTeX.com")
[/su_tab][/su_tabs]
Til sidst mangler vi blot at få beregnet alle effekterne i kredsløbet. Dette gøres ved hjælp af effektreglen. Vi kan gøre det på flere måder, både ved beregning af hver enkelt komponent eller ved at dele det mere op.
[su_tabs style=”modern-light” active=”1″][su_tab title=”Almindelig” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af virkeeffekterne
![\begin{align*} &P_1=U_{R1}*I=867,06*19,27=16706,62 \ [W] \\ &P_2=U_{R2}*I_2=181,91*3,31=601,64 \ [W] \\ &P_3=U_{R3}*I_3=200*2=400 \ [W] \\ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-802c9de8d03692d137c7fca49409e9a2_l3.png "Rendered by QuickLaTeX.com")
Beregning af wattløse effekter
![\begin{align*} &Q_L=U_L*I_2=83,12*3,31=274,93 \ [var] \\ &Q_C=U_{R3}*I_C=200*19,98=3996,11 \ [var] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-eff4d0717c1af07da963a0834f5db7e2_l3.png "Rendered by QuickLaTeX.com")
Beregning af tilsyneladende effekter
Beregning af den tilsyneladende effekt:
![\begin{align*} & S=\sqrt{(P_1+P_2+P_3)^2+(Q_C-Q_L)^2)} \\ &\Updownarrow \\ & S=\sqrt{(16706,62+601,64+400)^2+(3996,11-274,93)^2)}=18095,02 \ [VA] \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-f940f509ec65eddfcf36455d58117877_l3.png "Rendered by QuickLaTeX.com")
Vi kan kontrollere os selv ved at beregne med den påtrykte spænding og den samlede strøm.
![\[S=U*I=939,15*19,27=18095,52 \ [VA]\]](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-71c730ee56c4070aea83fd966fe2551c_l3.png "Rendered by QuickLaTeX.com")
Resultatet afviger en smule fra hinanden. Dette kan skyldes afrundinger mm. Da forskellen er minimal i forhold til beregningens størrelse ses dette som ubetydeligt.
[/su_tab] [su_tab title=”Vektorielt” disabled=”no” anchor=”” url=”” target=”blank” class=””]
Beregning af virkeeffekterne
![\begin{align*} &\vec P_1=\vec U_{R1}*\vec I^*=(867,06 \angle 74,93^\circ)*(19,27 \angle 74,93^\circ)^*=16706,62 \ [W] \angle 0^\circ \\ &\vec P_2=\vec U_{R2}*\vec I_2^*=(181,91 \angle -24,56^\circ)*(3,31 \angle - 24,56^\circ)^*=601,64 \ [W] \angle 0^\circ \\ &\vec P_3=\vec U_{R3}*\vec I_3^*=(200 \angle 0^\circ)*(2 \angle 0^\circ)^*=400 \ [W] \angle 0^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-e94b0184bf900c51024704c7ce3e4515_l3.png "Rendered by QuickLaTeX.com")
Beregning af wattløse effekter
![\begin{align*} &\vec Q_L=\vec U_L*\vec I_2^*=(83,12 \angle 65,44^\circ)*(3,31 \angle -24,56^\circ)^*=274,93 \ [var] \angle 90^\circ \\ &\vec Q_C=\vec U_{R3}*\vec I_C^*=(200 \angle 0^\circ)*(19,98 \angle 90^\circ)^*=3996,11 \ [var] \angle -90^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-03ada48a2923409ec0edd62366ac1a81_l3.png "Rendered by QuickLaTeX.com")
Beregning af tilsyneladende effekter
Beregning af den tilsyneladende effekt:
![\begin{align*} &\vec S=\vec P_1+\vec P_2+\vec P_3+\vec Q_L+\vec Q_C \\ &\Updownarrow \\ &\vec S=(16706,6\angle 0)+(601,6\angle 0)+(400\angle 0)+(274,9\angle 90)+(3996,1\angle -90) \\ &\Updownarrow \\ &\vec S= 18095,02 \ [VA] \angle -11,87^\circ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-6a07d09f1f30b8b295d9c2db99b4843c_l3.png "Rendered by QuickLaTeX.com")
Vi kan kontrollere os selv ved at beregne med den påtrykte spænding og den samlede strøm.
![\begin{align*} &\vec S=\vec U*\vec I^*=(939,15 \angle 63,06^\circ)*(19,27 \angle 74,93^\circ) \\ &\Updownarrow \\ &\vec S=18097,21 \ [VA] \angle -11,87^\circ \\ \end{align*}](https://elbogen.dk/wp-content/ql-cache/quicklatex.com-07c2c1bee18a8c4daf6d19ab56ccc13d_l3.png "Rendered by QuickLaTeX.com")
Resultatet afviger en smule fra hinanden. Dette kan skyldes afrundinger mm. Da forskellen er minimal i forhold til beregningens størrelse ses dette som ubetydeligt.
[/su_tab][/su_tabs]
Hermed er vores eksempel beregnet færdig:
